
Autonomous cars and human?
Drivers in human-driven car and pedestrians communicate with each other via eye contact and hand gesture, which do not exist in autonomous cars. With autonomous cars being tested in many cities around the world, the lack of interpersonal communication poses a challenge in having clear communication between autonomous cars and pedestrian.
Project aims
This project aims to design a communication solution and answer the question of how people understand and trust this solution in their interaction with driverless cars, especially in the situation not regulated by a traffic light. The existing frameworks have identified intent and awareness as key factors to be considered for trusted communication between driverless cars and pedestrian. This study observed and analysed 16 participants in different scenarios at a pedestrian crossing having no traffic light.
Literature Review
To form the research questions, I reviewed papers of different domain such as autonomous cars, interaction between cars and pedestrian in urban environment, trust between human and technology, cognition, virtual reality. In the end, I shortlisted and used around 15 papers as references in this project. I found that there was a gap in the way previous researchers prototyped and evaluated design solution for the interaction between pedestrians and autonomous cars.
I reviewed more than 50 papers to form the research questions.
Components of Trust
As we are integrating intent and awareness into the solution, we also want to see the impact of these two factors in creating trust. Intent and awareness contribute to how people understand the system and therefore contribute to the cognition-based trust. As trust has both affect-based and cognition components, we will quantify trust in relation to the value of these two categories.
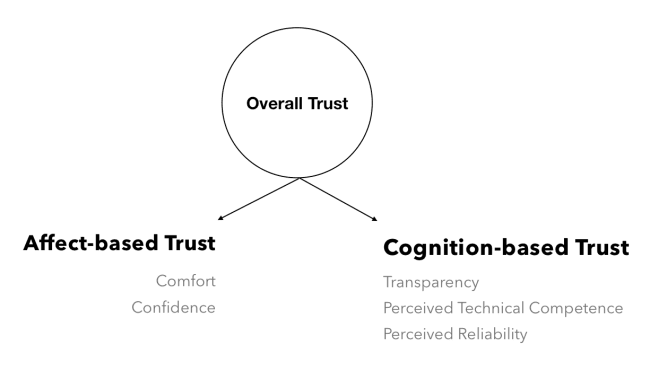
Trust has affect-based and cognition-based components, which we are going to measure in this study.
Researcher Questions
Question 1
How can driverless cars communicate their intent and awareness to pedestrians, especially in situations not facilitated by traffic lights?
Question 2
How do intent and awareness affect pedestrian trust toward the new communication solution?
Design Methodology
Prototyping in Virtual Reality requires the solution idea to have specifications regarding appearance, animation, which was first assessed and adjusted in 2D prototypes. Each iteration was subjected to evaluation using the heuristics framework formed in a previous research on driverless-car-pedestrian interaction.
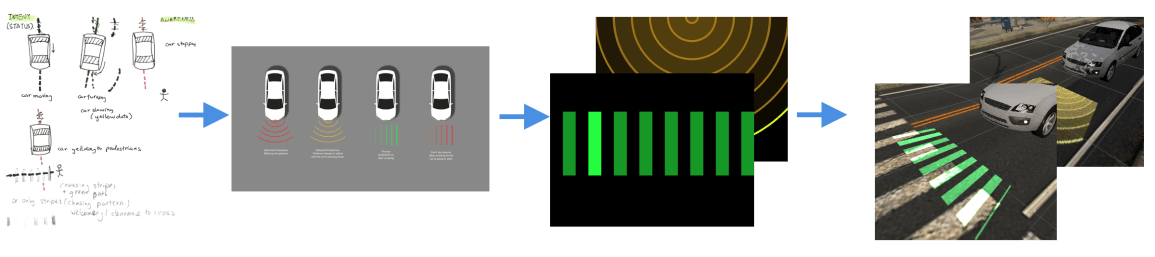
The design process was iterative, from sketching, digital mockups, code-based prototype in Processing to 3D mockup in Unity.
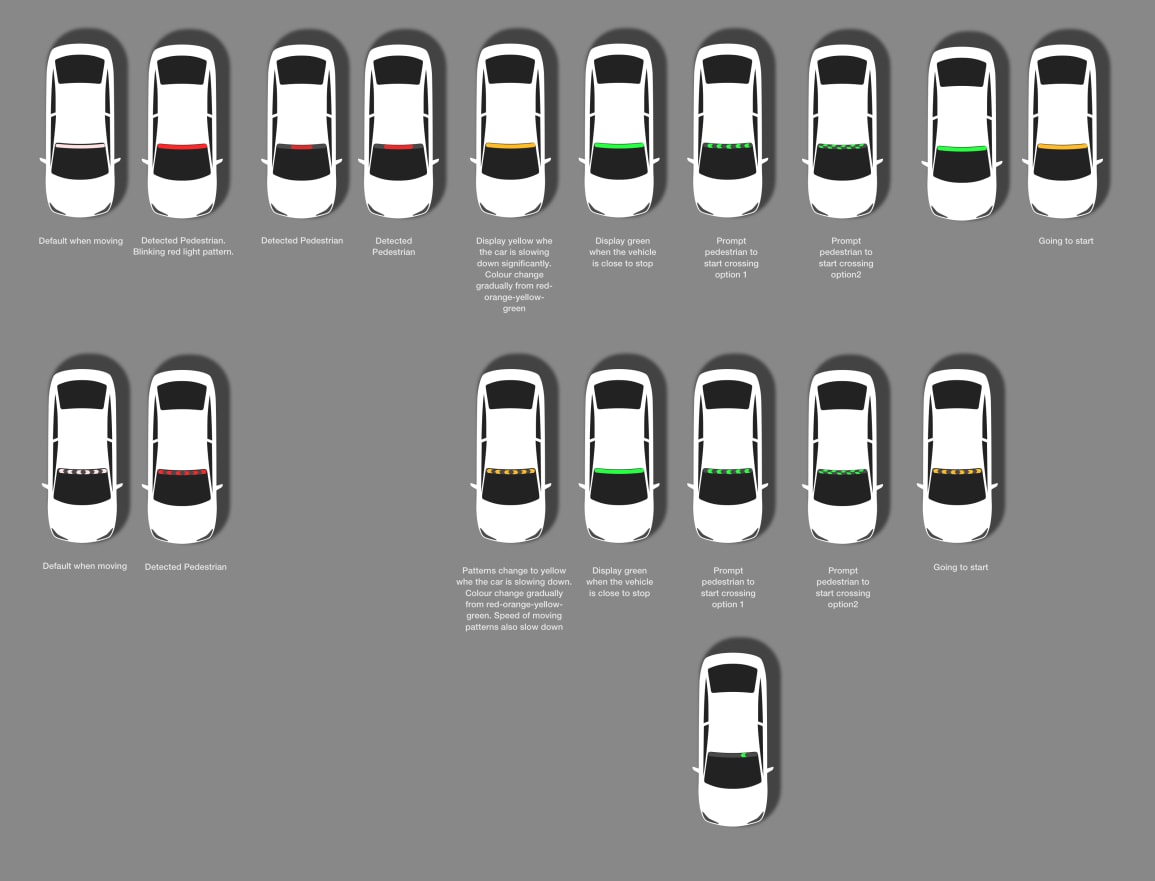
Design variations and iterations of the light signal.
The animation was programmed in Processing to gain better control of design variables such as framerates, gaps, colour, speed.
Experimental Design
As our research objective is to study how design elements intent and awareness impact people trust in communication with autonomous cars, we want to test our solution in various scenarios having different intent and levels of awareness. The hardware that controls awareness are car sensors, so we design scenarios to have sensor failure at different points of time to evaluate how pedestrians would react and behaviour, and most importantly whether people can make a safe decision using the communication the car sends.
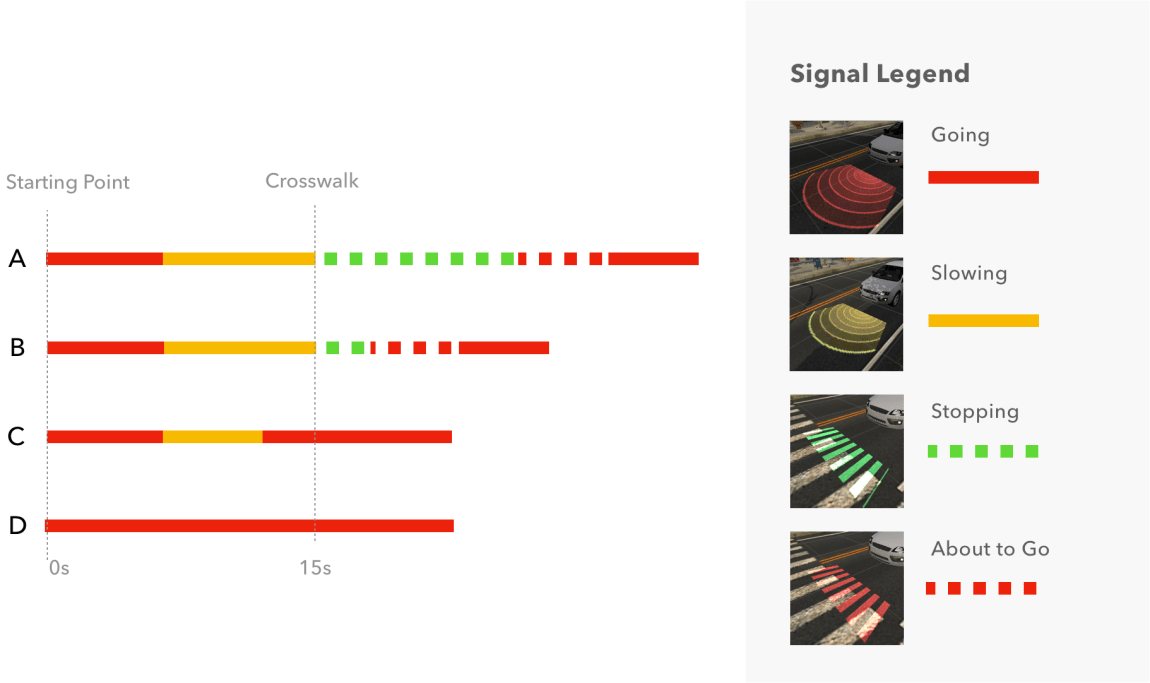
Four scenarios: (A) Car sensor works well throughout the scenario (B) Car sensors fails when the pedestrian is crossing (C) Car sensors fails before the car completely stop (D) Car does not see the pedestrian at all.
Study in Virtual Reality
In the process of designing for interaction between pedestrians and driverless cars, prototyping a novel solution with physical materials is difficult due to required cost and time. Virtual Reality(VR) was chosen in this project as the most suitable medium to study people’s perception toward our solution.
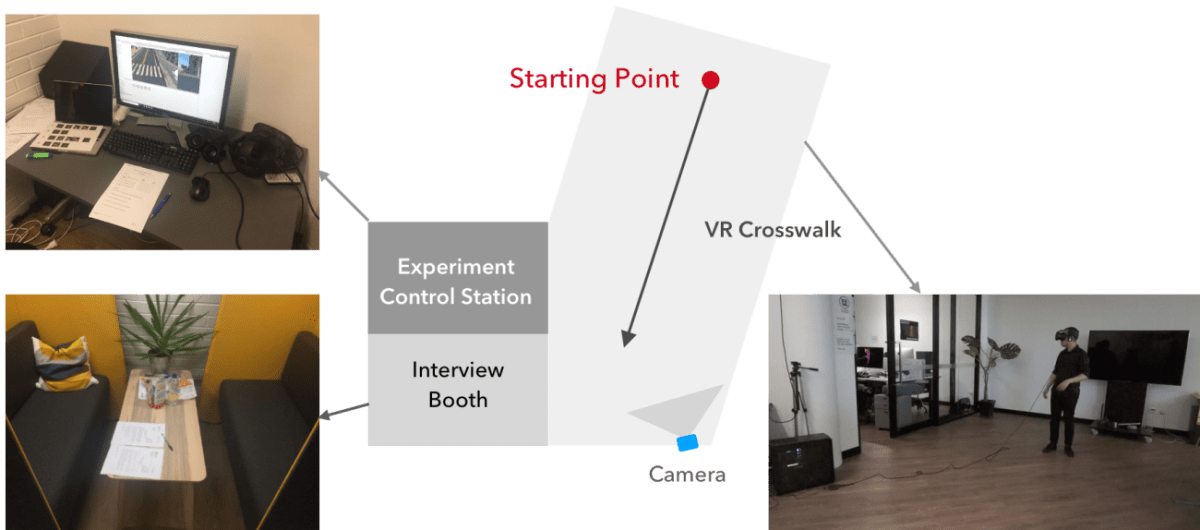
The test setup had enough room for walking inside VR and interview booth that allowed comfort when answering the questions.
Data Collection & Analysis
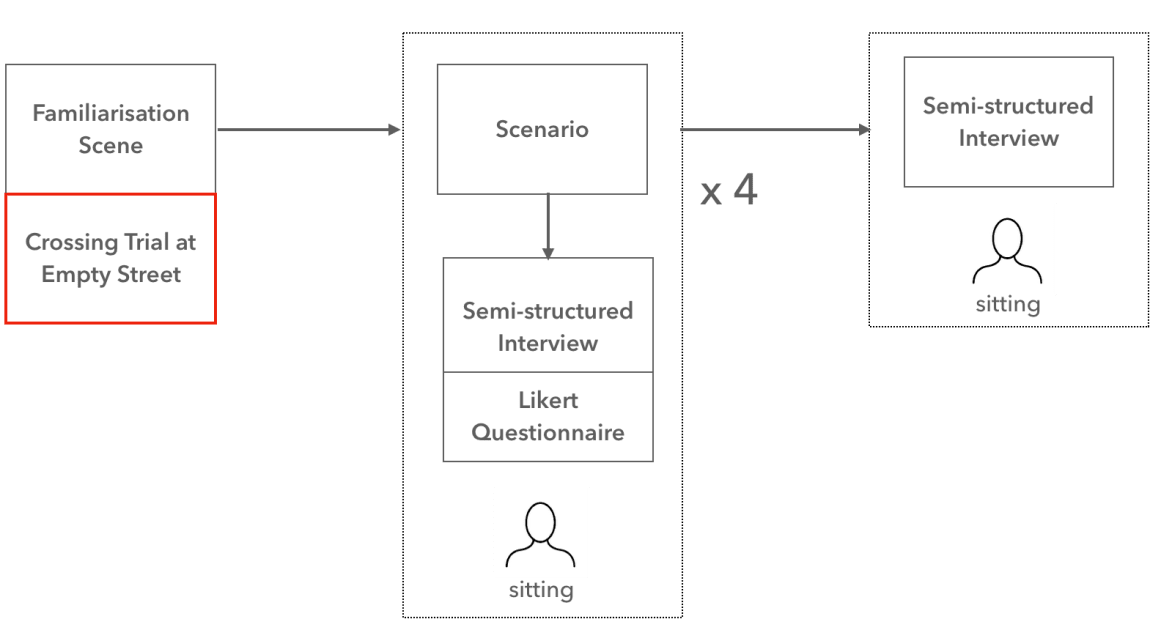
Qualitative methods are mainly used in this research. Quantitative methods are used in conjunction to validate the qualitative result, as well as to assess the relationship between comfort, intent, awareness and trust level. After each scenario, the participant was asked to answer open-ended interview questions and rate the Likert questionnaires.
(1)The observation about participant behaviour was used to ask a question about why they acted in certain ways. This data was stored in video recording to be matched with the recording of VR situation recording.
(2) Quantitative data collected using a Likert questionnaire was analysed in Multiple Regression Analysis to understand the contribution of intent and awareness to trust.
(3) Qualitative data collected in semi-structured interviews was analysed using thematic analysis. Based on the literature review of previous studies, we identified two following main themes and used them in deductive content analysis: 1) People’s understanding of the communication model with driverless cars, which include intent and awareness. 2) People’s behaviours around driverless cars, which include cultural preferences, usual behaviours. The sub-themes were derived further from the content.
Different types of data were collected in the study.
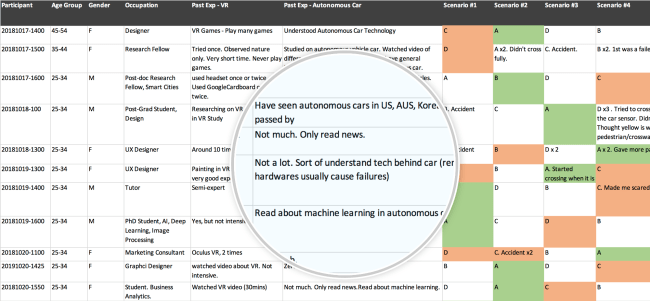
18 participants have a wide variety of background knowledge about autonomous car.
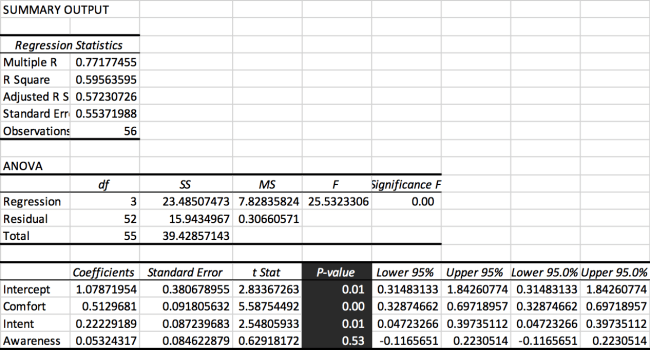
Multiple Regression Analysis was used to understand the relationship between Trust and other variables such as Comfort, Intent and Awareness. Good p-values support the strong relationship.
Result
The result confirmed that the comfort and intention of the cars understood by pedestrian contribute to the overall trust toward communication with driverless vehicles. Participants did not rely significantly on knowing whether the car is aware of their presence to make a decision. The use of Virtual Reality as a testing medium is proven to be effective as participants exhibited emotions and behaviours that they normally have shown in real life situations.
Participants exhibited behaviours they normally have in real-life crossing situations.
Reflection
Though the project has limitations, I am satisfied with the fact that it was concluded with interesting insights for any future researches on this topic, and also how the project has shaped my thinking about design research.
As a researcher, I learnt how to become a better person by embracing both the up and downtime of doing research. My down moments were many and up moments are few, among which there was a moment in this project that I felt enlightened by new knowledge. It was when I interviewed the first participant from India. He didn’t use the design solution at all, which made me feel uncomfortable at first as I didn’t understand why. But I felt more encouraged when he started sharing why. My design is not yet for everyone. And this new insight hadn’t been highlighted by other researches as well, which also mean it will be valuable in the future. To me, doing research requires the mindset that what I set out to do initially might produce unexpected results, some of which might confirm the failure or limitation of research. But in the journey of creating new values, I should embrace the notion that I might be wrong, and that understanding failure is critical to success.

